

RoArm-M3-S 手柄控制
. 使用手柄或键盘控制机械臂
本章节介绍如何使用键盘按键或手柄来控制机械臂,RoArm-M3 系列机械臂出厂时并没有附带手柄,您可以自行购买 Xbox 蓝牙手柄,连接至电脑进行控制。
如果您是跟着前面的教程操作下来的,在开启机械臂控制相关节点之前,需要先关闭上一章节 Moveit2 拖拽交互的例程,在运行Moveit2 拖拽交互例程的终端窗口中,按 Ctrl+C 进行关闭这个进程。机械臂驱动节点的运行终端不需要进行操作关闭,否则不能控制现实中的机械臂。
若您也结束了机械臂驱动节点的运行终端进程,则需要根据 3.驱动节点控制现实中的机械臂中的内容重新运行。保持机械臂驱动节点的运行,接着再运行机械臂控制相关节点。
- 在关闭 Moveit2 拖拽交互例程的终端界面中输入以下指令开启机械臂控制的相关节点,会打开一个新的 Rviz2 机械臂模型界面:
ros2 launch moveit_servo demo.launch.py
- 也可以在新终端界面来运行,在新终端界面运行一定要先进入机械臂 ROS2 的工作空间,再开启机械臂控制的相关节点,如下:
cd roarm_ws_em0
ros2 launch moveit_servo demo.launch.py5.1 键盘控制机械臂
按 Ctrl+Alt+T 打开一个新的终端窗口,进入机械臂 ROS2 的工作空间,运行以下命令末端关节的控制指令:
cd ~/roarm_ws_em0/
ros2 run roarm_moveit_cmd setgrippercmd再按 Ctrl+Alt+T 打开一个新的终端窗口,进入机械臂 ROS2 的工作空间,运行以下命令获取来自键盘的控制指令:
cd ~/roarm_ws_em0/
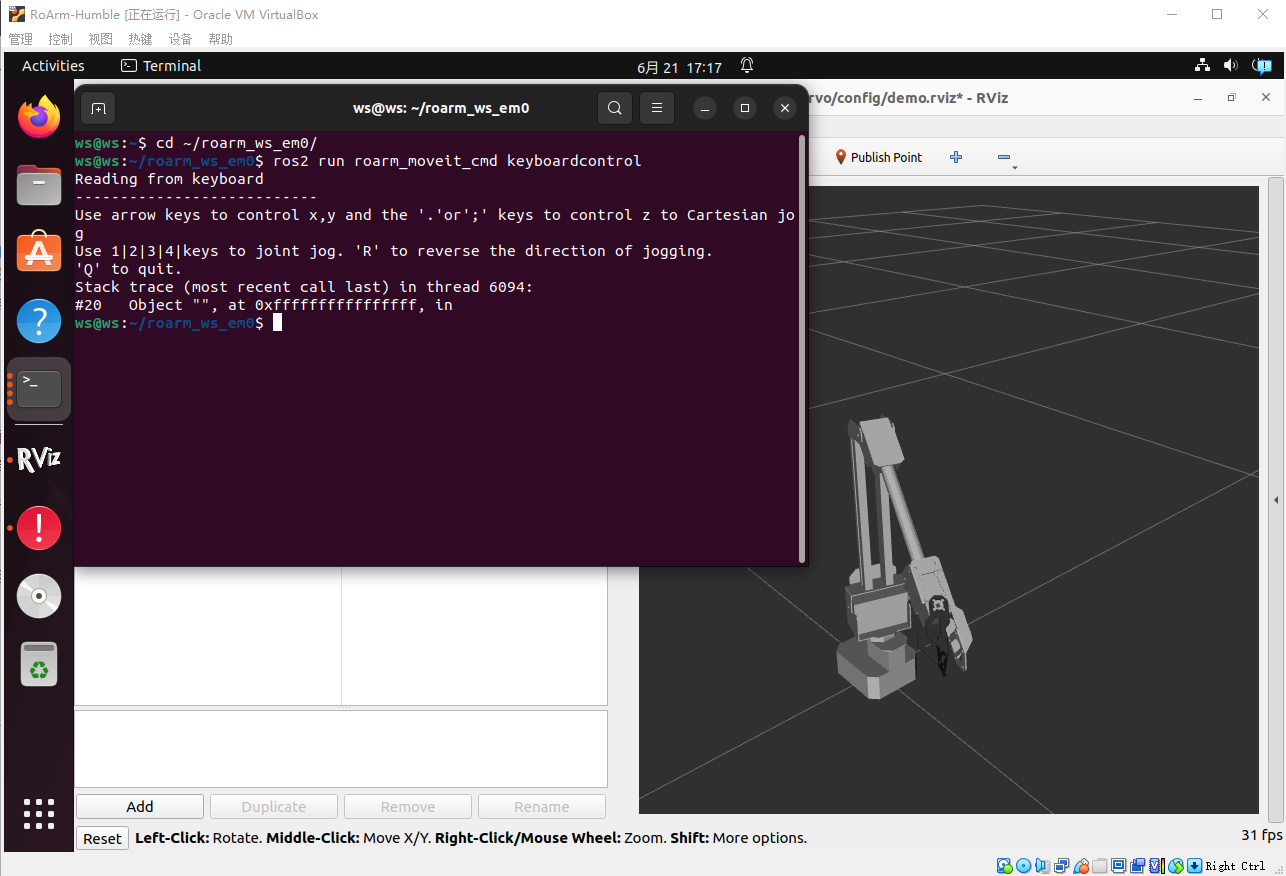
ros2 run roarm_moveit_cmd keyboardcontrol保持这个终端窗口为激活状态(即确保操作按键时位于该终端窗口界面),通过以下按键来控制机械臂:
- 坐标控制
- 方向键 ↑:X 轴正方向运动;
- 方向键 ↓:X 轴负方向运动;
- 方向键 ←:Y 轴正方向运动;
- 方向键 →:Y 轴负方向运动;
- ; 键:Z 轴正方向;
- . 键:Z 轴负方向;
- 关节控制
- 数字 1 键:底座关节运动;
- 数字 2 键:肩关节运动;
- 数字 3 键:肘关节运动;
- 数字 4 键:夹爪关节运动;
- 字母 R 键:切换上述关节控制的运动方向。
最后按字母 Q 键退出操作即可。
5.2 手柄控制机械臂
将手柄接收器接入电脑中,点击 Oracle VM VirtualBox 上方的“设备”→“USB”→带有 XBox 字样的设备名称,该设备名称前出现 √,则代表手柄连接到虚拟机上。可以通过以下手柄按键功能来控制机械臂:
- 左边的关节控制:
- 左右按键:底座关节运动;
- 上下按键:肩关节运动;
- 右边的关节控制:
- X、B 按键:肘关节运动;
- Y、A 按键:夹爪关节运动;
- XY 轴坐标控制:
- 左右摇臂:Y 轴运动;
- 上下摇臂:X 轴运动;
TAG:
手册
DeepSeek豆包ESP32-AI小智教程
ESP32 S3 RS485
USB转CAN FD
播放大功率宽电压
CAN逻辑分析仪
1.54寸无源NFC电子墨水屏G 黄黑白四色 无须电池 无线供电&刷图
ESP32-S3工业级WiFi继电器IOT物联网RS485蓝牙
资料
RTL8723 WIFI模块SDIO适用Luckfox Pico Mini B /Luckfox Pico Plus /Luckfox Pico Pro /Luckfox Pico Max
ESP32-S3
机械键盘
工位电子铭牌
树莓派5/4B不启动更新BootLoader EEPROM教程
桌面小摆件
树莓派5 PCIe转千兆网口Gigabit ETH RJ45转接板PI5免驱动RTL8111H
树莓派5 PCIe转M.2 4G 5G和USB 3.2 HUB转接板
树莓派1.3寸IPS LCD扩展板 显示屏 教程
工业级USB转RS232/485/422/TTL多功能串口转换器FT4232HL
树莓派PICO 10.1寸显示屏

TAG:
ESP32-S3
树莓派5立式ICE Tower小冰塔CPU散热RGB风扇U型铜管鳍片塔式
汽车电动车灯恶魔之眼电子眼赛博玩具公仔玩偶仿生机器人眼睛
PD电源
0.96寸1.3寸1.44寸1.8寸LCD显示屏TFT圆形SPI液晶屏ST7735
树莓派5电源白色
斑梨
USB逻辑分析仪Sipeed SLogic Combo DAPLink CKLink UART串口
工业级5G路由器
树莓派UPS
Pi5外壳
Arduino SSD1357
树莓派5工业外壳
树莓派5寸LCD显示屏1024x600窄边电容触摸屏HDMI电脑
树莓派5 PCIe转USB HUB 3.2 Gen1 PI5高速USB接口
SC09串行UART总线舵机电机双模式2.3kg 300度
Milk-V Duo linux开发板
树莓派5 27W
树莓派5
X1200 树莓派5 UPS