- 首页
- >
- 文章中心
- >
- 幸狐/LuckFox
- >
- Luckfox-PICO
幸狐Luckfox Pico RV1103【UART测试】
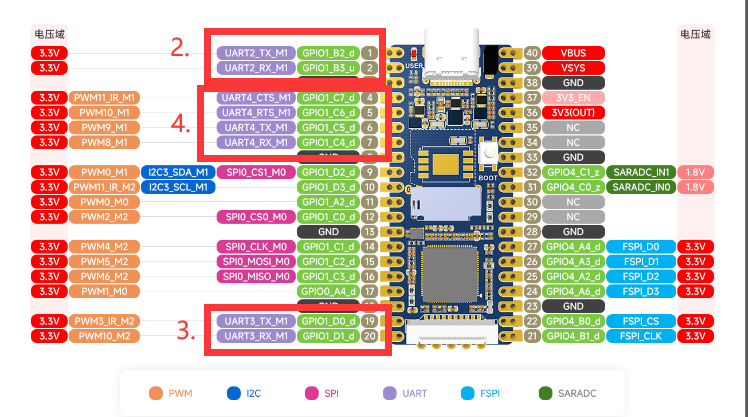
LuckFox Pico 有三个串口,UART2、UART3 和 UART4,其中 UART2 为调试串口。
LuckFox Pico Plus 有四个串口,UART2、UART3、UART4 和 UART5,其中 UART2 为调试串口。
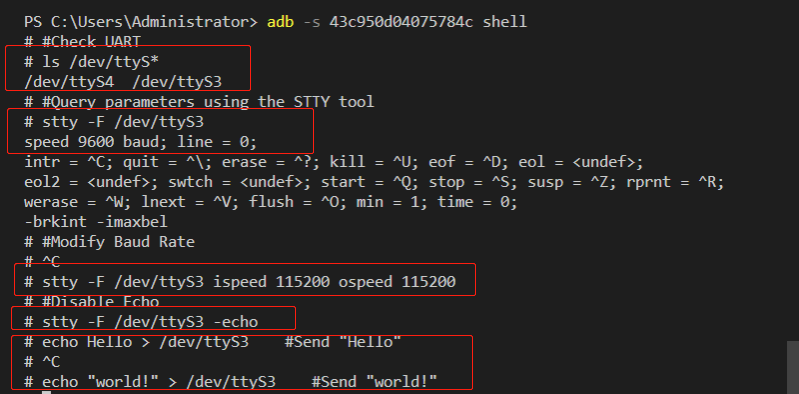
】使用 GPIO sysfs 接口进行串口测试:
1] 查看串口 :
root@linaro-alip:/home/linaro# ls /dev/ttyS*
/dev/ttyS3 /dev/ttyS4
##这里串口设备是UART3和UART4
2] 用 stty 工具查询串口通信参数:
linaro@linaro-alip:~$ stty -F /dev/ttyS3
speed 9600 baud; line = 0;
-brkint -imaxbel
##默认波特率为9600
3] 修改波特率,其中ispeed为输入速率,ospeed为输出速率:
stty -F /dev/ttyS3 ispeed 115200 ospeed 115200
4] 关闭回显:
stty -F /dev/ttyS3 -echo
##关闭回显是指在终端或串口通信中,输入的字符不再显示在终端上。
5] 操作流程截图:
】与Windows主机通讯:
将串口模块一端连接电脑,另一端连接 LuckFox Pico 的物理引脚的18(GND)、19(UART7_TX)和20(UART7_TX)上。
下载并打开 PUTTY(或其他任何串口软件),选择串口,设置波特率(默认为9600,请根据自己实际修改过的数值设置)。
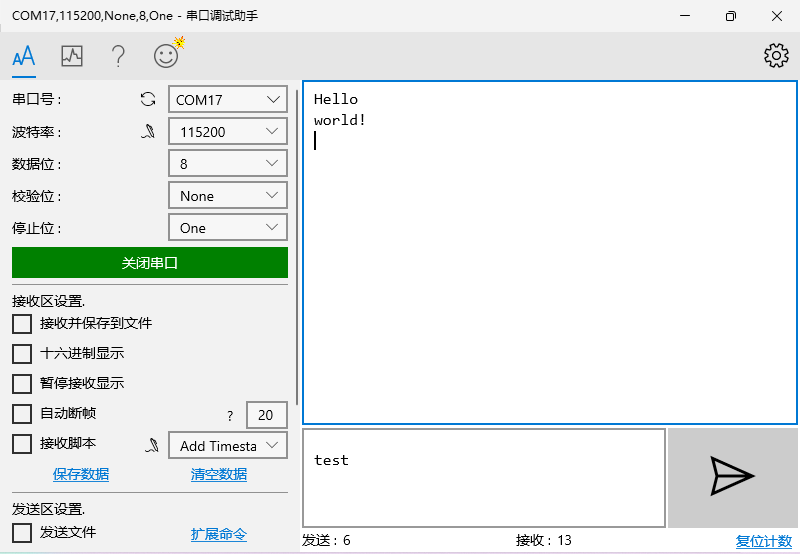
在开发板上的终端执行以下指令,使用 echo 命令向终端设备文件写入字符串"Hello"和"world !":
echo Hello > /dev/ttyS3
echo "world !" > /dev/ttyS3
Windows 上的串口调试助手会接收到内容:
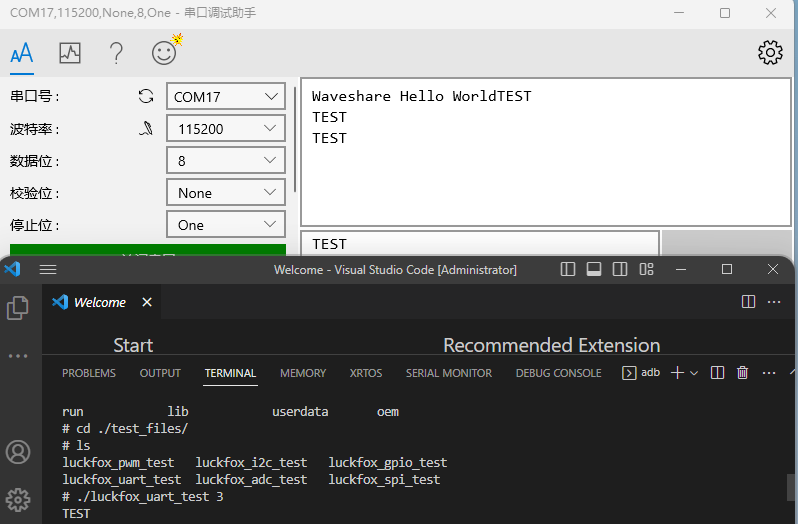
】测试官方SDK自带例程:
(以下操作需进入Pico开发板的终端进行操作)
3] 运行测试例程:
chmod 777 ./luckfox_uart_test
## 赋予文件可执行权限
./luckfox_uart_test 3
##例程参数3表示UART3
4] 打开串口通讯设备接收数据: