

Bus-Servo-Adapter-A教程
资料
总线舵机驱动电路
程序
- ST 总线舵机控制库(Python)
- ST/SC 总线舵机控制库(Arduino IDE)
- ST/SC总线舵机控制库(Linux)
- ST系列STM32F103的SDK
- SC系列舵机示例程序
- ST系列舵机示例程序
软件
开源结构
产品说明
前言
本产品是一款总线舵机驱动板,集成舵机供电功能和舵机控制电路,提供了不同语言控制总线舵机的例程,并且支持对舵机进行编程改变舵机的ID和工作模式(舵机模式/电机模式)等,理论上可以控制253个总线舵机并且读取每个舵机的当前角度、负载、电压、模式等信息,可以使用串口连接到上位机来控制总线舵机转动,适用于机械手臂,六足机器人,人形机器人,轮式机器人等需要反馈舵机角度和负载的机器人项目。
产品规格
- 输入电压:9~12.6V电压输入(输入电压需要与舵机电压匹配)
- 通信接口:UART
- 供电接口:5.5*2.1mm DC
- 产品尺寸:42mm x 33mm
- 固定孔通径:2.5mm
产品特性
- 用于连接上位机或MCU来控制总线舵机转动
- 可同时控制多达253个ST/SC系列总线舵机(前提是供电充分)
- 9~12.6V电压输入(输入电压需与舵机电压匹配)
- 集成稳定的控制电路,确保总线舵机稳定运行
- 提供便捷的总线舵机控制解决方法
- 迷你小巧,节省空间,适合嵌入到各种对空间要求较高的项目当中
开源项目
你可以在产品资料中下载相关的开源机器人模型,用于搭建你自己的项目。

产品使用
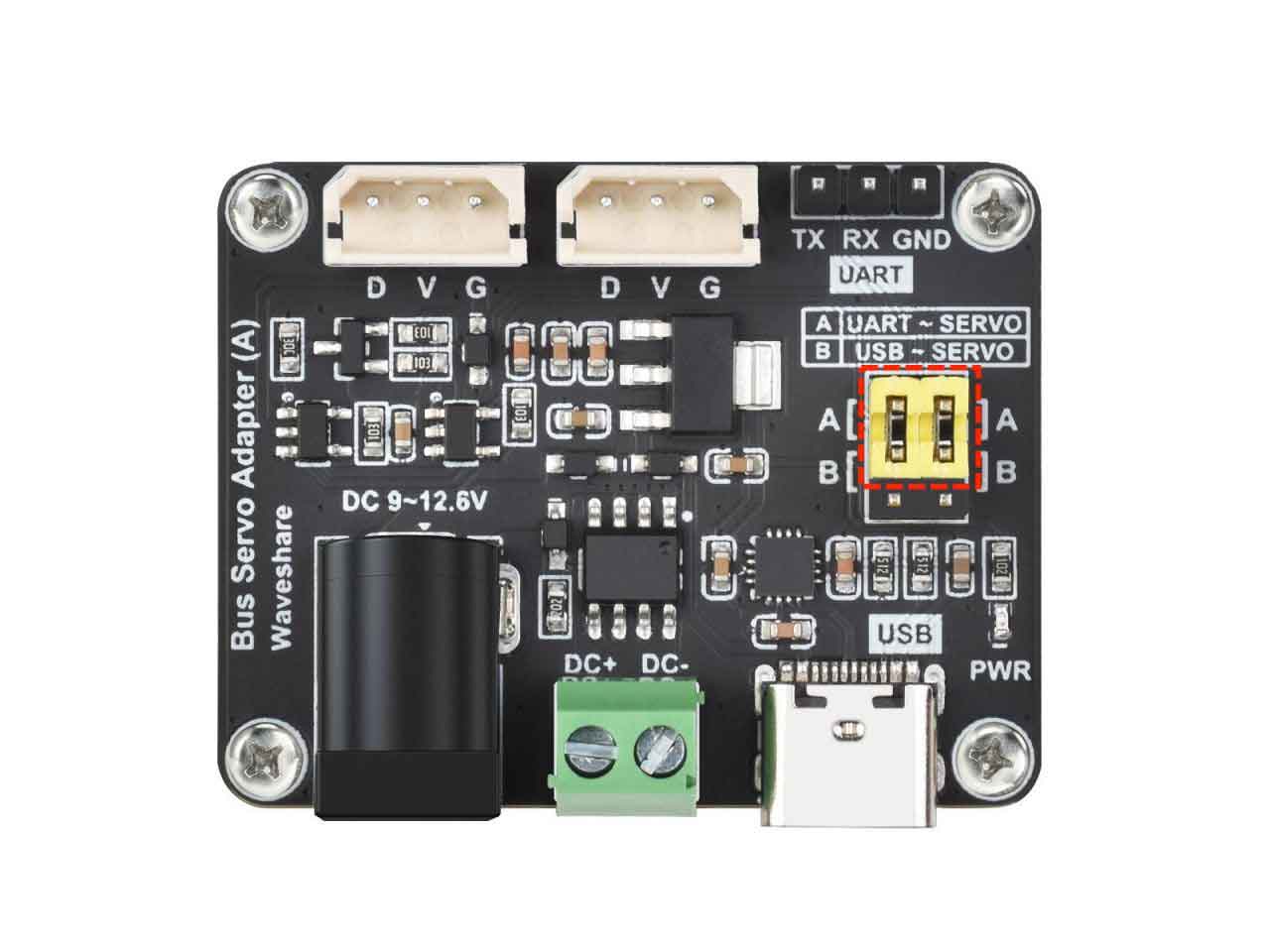
通过UART控制
对于没有USB接口的设备,可以通过UART串口与硬件设备进行连接来实现总线舵机的控制与数据回传,且连接方式必须时RX-RX、TX-TX相对应地连接,注意此时Bus Servo Adapter(A)驱动板上的跳线帽要在A的位置(如图)。并且在资料部分中提供适用于不同硬件设备的SDK。
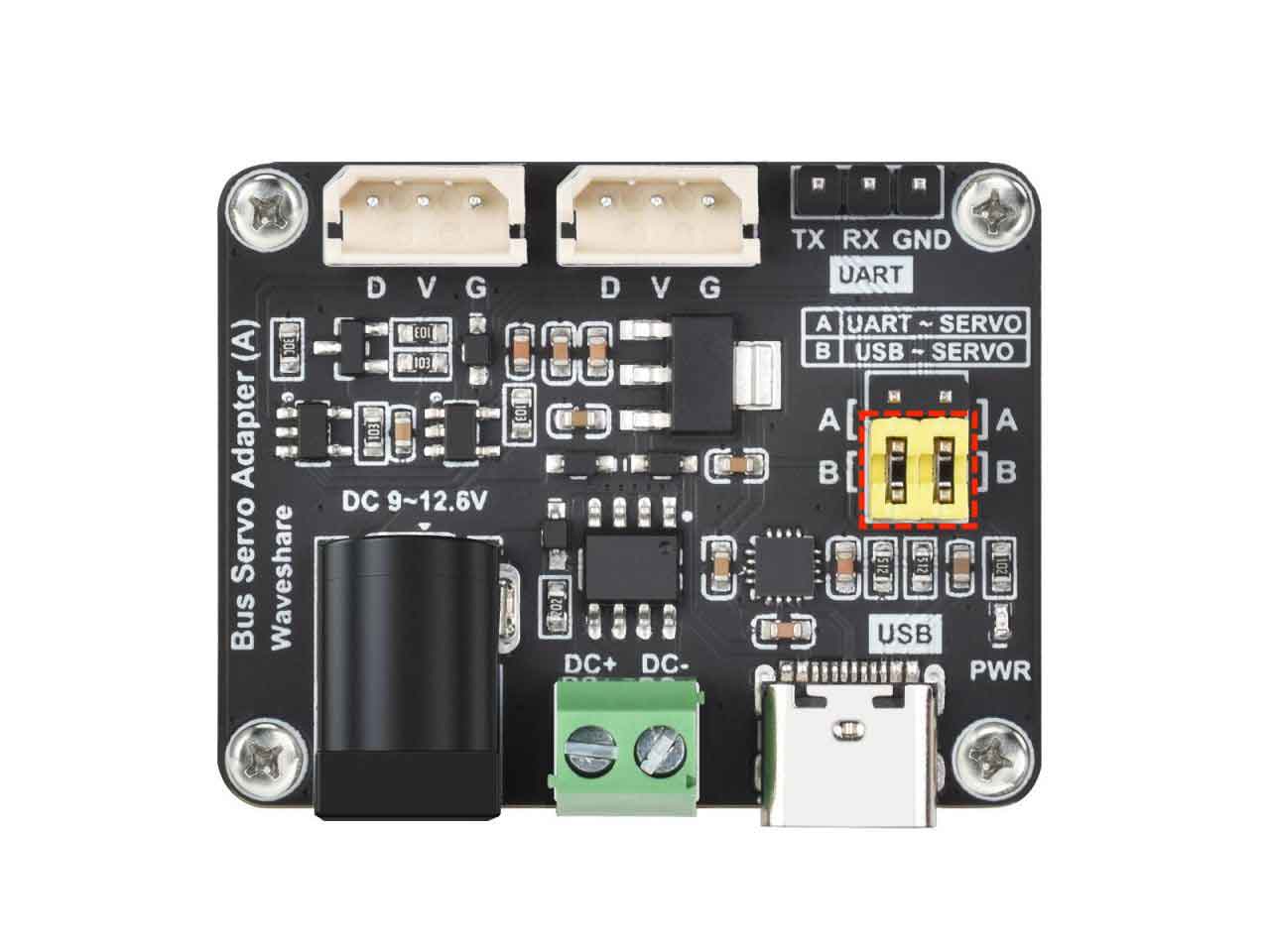
通过USB控制
当Bus Servo Adapter(A)驱动板上的跳线帽在B的位置时(如图),可以通过USB线将驱动板与上位机连接,即可直接通过上位机实现总线舵机的控制,也可实现舵机数据回传。可以在不同的上位机中通过不同的语言来控制总线舵机。


{kind=link}
-B.jpg){kind=link}