- 首页
- >
- 文章中心
- >
- Jetson系列
- >
- Jetson扩展模块
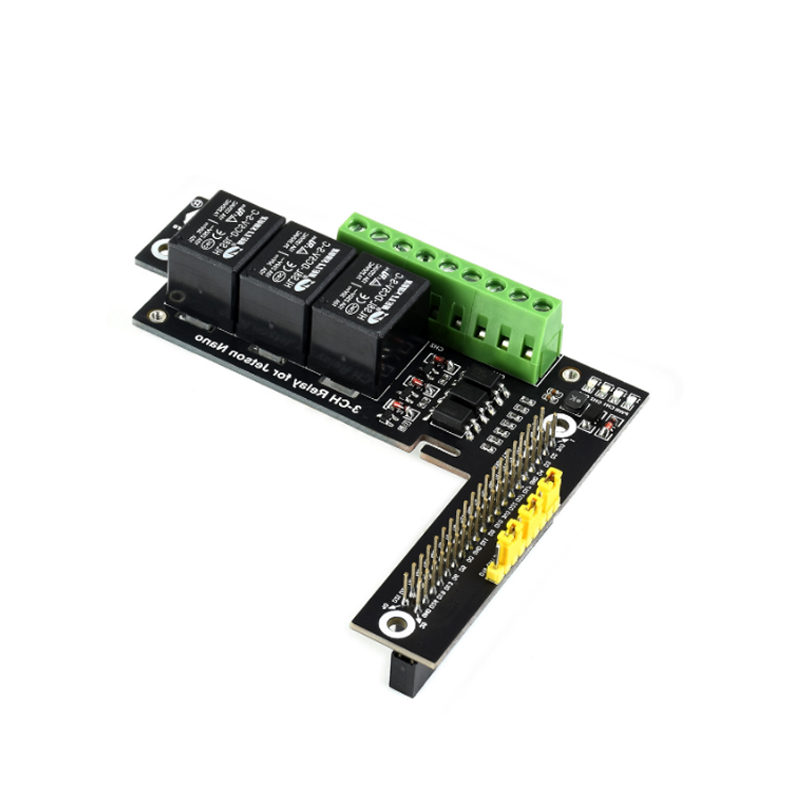
3-CH Relay for Jetson Nano使用教程
产品特性
产品简介
- 基于 GPIO 40PIN 接口设计,方便直接插到 Jetson Nano 上
- 采用优质继电器,允许接入负载:≤5A 250V AC 或 ≤5A 30V DC
- 带光耦隔离,避免高压电路干扰
- 带继电器指示灯,方便查看继电器的工作状态
- 带继电器选择跳线帽,方便切换其他引脚进行控制
- 带亚克力板,隔离 Jetson Nano 与扩展板底部接触
- 提供完善的配套资料手册 (python 和 python-bottle 例程)
接口说明
继电器通道和 Pi 引脚的对应关系:
| 通道标号 | BCM | 描述 |
| CH1 | P21/P16 | 通道1 |
| CH2 | P20/P19 | 通道2 |
| CH3 | P26/P13 | 通道3 |
【注意】PCB 上的丝印标示对应 BCM 编码。
黄色跳冒用途
Relay_JMP 是继电器控制管脚选择跳线。当连接跳线帽时,即可使用树莓派控制继电器。
栗子:如果想要将A,B两块叠加,那么: A板的跳帽应该置于P21,P20,P26; B板的跳帽应该置于P16,P19,P13;
Jetson nano使用
下载代码
下载程序并进入指定目录
- sudo apt-get install p7zip
- wget https://www.waveshare.net/w/upload/f/f8/3-ch_Realy_for_jetsonnano.7z
- 7zr x 3-ch_Realy_for_jetsonnano.7z -r -o./3-ch_Realy_for_jetsonnano
- cd 3-ch_Realy_for_jetsonnano
测试例程
硬件设置:将板载跳帽置于P21,P20,P26(出厂设置); 在3-ch_Realy_for_jetsonnano目录下,执行:
- sudo python test.py
预期结果:模块上的继电器依次闭合,然后依次断开,每个继电器带有响应的指示灯,通过观察指示灯的状态可知。当用户想要停止运行程序时,按Ctrl+C键可以停止程序的运行
网页控制
本例程的网页控制是基于 python Web 框架来控制继电器的。
进入 Linux 终端,在终端执行以下命令:
- sudo apt-get install python-bottle
- cd python-bottle
- sudo python main.py
在谷歌浏览器(其他浏览器可能不兼容)地址栏内输入树莓派 ip 地址,端口号 8080
栗子:树莓派IP为:192.168.1.110,端口为8080;
那么在浏览器地址栏输入:192.168.1.110:8080(注意冒号是英文)
点击对应的通道即可控制继电器开关。